[VIP第1年] 指数:3
[VIP第1年] 指数:3
使用达宽平台级力控大脑进行机器人座椅力控检测有以下优势:
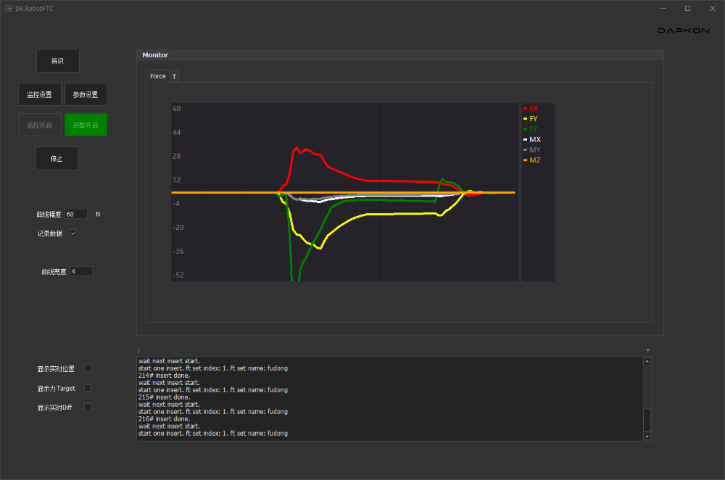
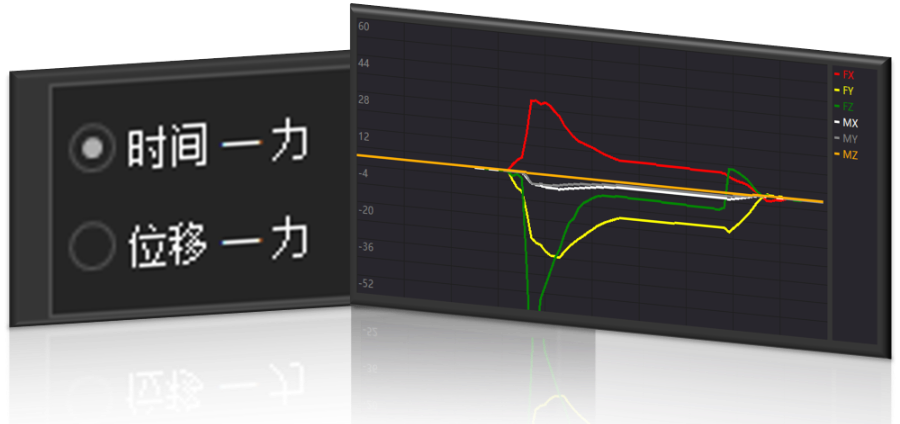
数据的实时采集与可追溯能力达宽机器人力控检测系统能够实时收集检测数据,并在用户界面中通过曲线直观地展示给用户,满足厂商记录座椅检测数据的需求。此外,系统在每个伺服周期均对工艺数据进行实时记录(ms级),***保障流程的可追溯性、可复现性以及可孪生性。这不仅助力用户高效积累现场工艺数据,更为工艺的持续优化提供了坚实有力的依据,推动生产效能与质量的稳步提升。 机器人力控技术实现齿轮装配全流程数据追溯,达宽科技助力企业构建数字化质量管理体系。北京柔性装配力控系统优势

力控系统的一个优势就是它能帮助机器人精细控制施加的力,从而确保机器人的操作更符合预期。在传统的机器人应用中,机器人往往依赖预设的轨迹进行运动,这种方式虽然可以完成一些简单的任务,但在面临柔性和复杂任务时,效果大打折扣。而力控系统则通过实时检测机器人与目标物体之间的接触力,能够实时调整运动轨迹和施加的力量。这种精细的控制方式不仅有效避免了因操作不当造成的物料损坏,还提升了机器人的适应性和灵活性,帮助企业在面对多样化生产任务时,提高效率和任务完成的质量。达宽科技提供的力控系统正是通过这种高精度的力控技术,让机器人能够更精细地执行任务,无论是在工业生产中的高精度装配,还是在对微小操作的要求,力控系统都能发挥其独特的优势,极大提升了机器人工作的可靠性和执行速度。这种技术的应用,帮助企业节省了大量的时间和成本,同时提升了整体生产效率。中国香港抛光力控系统软件达宽科技力控系统建立全链路数据闭环,优化汽车线束质控流程,推动智能制造数字化转型。

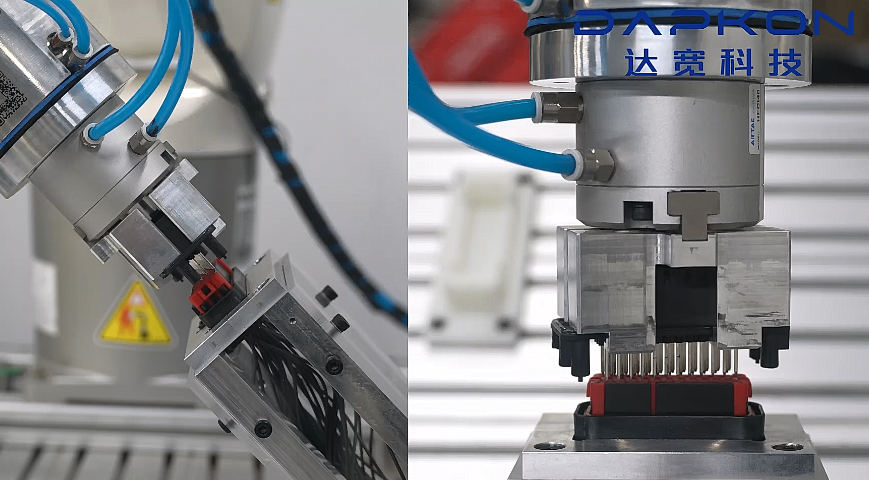
我们将以ABB工业机器人为例,介绍如何基于达宽平台级力控大脑装配服务器的多种线束。首先,使用工具坐标系精确示教多个线束接口和多个服务器接口的对应初始位置。我们注意到,该服务器有多种规格的接口,我们演示了HDMI、USB、电源和网线的装配,这四种线束是不同的接口,线束粗细也不同。使用工装夹持线束接口,分别到达指定点位。面对这种装配过程中的微小偏差和不规则性,达宽力控系统采用了基于柔性力控的自适应补偿技术。这项技术利用六维力传感器实时监测力的微小变化,并控制机器人实时微调其位置和姿态,在特定方向上减少力,从而让接口能够准确对接。
随着人工智能、物联网等技术的飞速发展,机器人技术正在朝着更高的智能化水平迈进。在这一背景下,力控系统成为了机器人智能化不可或缺的技术之一。通过结合先进的传感器技术和实时控制算法,力控系统能够让机器人在执行任务时具备“感知”能力,实时判断和调整操作力量,从而在各种复杂环境下都能保持高效、精确的工作表现。这不仅推动了机器人技术的不断进步,也为全球制造业的智能化转型提供了强有力的支持。作为国内力控系统领域的企业,达宽科技凭借其强大的研发能力和技术创新,不断推动力控系统的发展。无论是在智能制造领域,还是在机器人应用的前沿技术探索中,达宽科技的力控系统始终走在行业前沿,帮助各行各业实现机器人任务的智能化、自动化,并为未来的制造业发展奠定了坚实的技术基础。达宽科技机器人力控系统支持定制化工艺,复杂齿轮组装配效率提升,突破传统产能瓶颈。

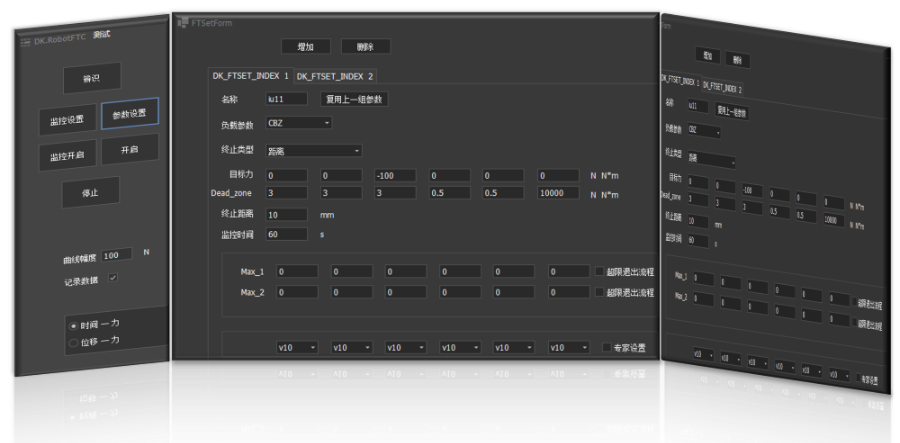
达宽科技的力控系统软件具备灵活的超限报警功能,用户可以根据每个监测方向设置两级报警阈值。此外,软件还配备了超限自动退出机制。一旦检测到超出设定的安全值,系统不仅会发出警报信号,还会自动中断装配流程,确保传感器和工件的安全。该软件还提供了一个高度灵活的参数管理系统,内置多组力控参数和负载辨识参数的保存功能。用户可以为每组参数定制个性化的终止条件,以满足特定应用场景的需求。同时,系统支持多组力控参数调用同一负载参数设置,简化了配置流程,并确保力控调节过程中对负载特性的一致性理解。无论工况如何变化,系统都能快速适应,保障操作的高效性和一致性。达宽科技力控系统同步监测传动组件状态,实时优化装配策略,保障齿轮箱长效平稳运行。中国香港抛光力控系统软件
机器人力控系统智能适配多场景,达宽科技解决方案降低人工误差,节省检测时间成本。北京柔性装配力控系统优势
现代工业机器人虽装配了高精度伺服电机和精细传动机构,运动精度可达亚毫米级,但在力度与位置的精细把控上仍存挑战。为确保各连接点符合严苛质量标准,力控技术的引入尤为关键。力控方案借助力觉反馈,把力传感器安装于机器人末端执行器。达宽科技的实时力控系统能精细识别并补偿负载,使末端执行器处于零重力状态,进而精确感知末端所受外力。依据工艺要求和实时外力检测,系统向机器人发送补偿信号,控制单元依此动态调整动作,实现精细力控操作。北京柔性装配力控系统优势
文章来源地址: http://smdn.huanbaojgsb.chanpin818.com/ruanjian/rjkfgs/deta_27341053.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。